ergonoomiline lähenemine
Toimetanud dr Giovanni Chetta
Jala oma "antigravitatsioonialuse" rollis puutub esmalt kokku tugipinnaga, kohanedes sellega, vabastades selle, seejärel jäigastub, muutudes kangiks pinna enda "tagasilükkamiseks". Seetõttu peab jalg lõdvestumistingimusi vahelduma jäigastumise tingimustega. Lõtvuse-jäikuse vaheldumine õigustab analoogiat muutuva sammuga propelleriga. Taga- ja esijalad on paigutatud tasanditesse, mis ristuvad erineval viisil. Ideaalses seisukorras on tagumine jalg paigutatud vertikaalselt ja esijalg horisontaalselt (horisontaalsele toele) pind). Kui jalg on koormuse all, nõrgeneb lõdvestudes tagumise jala ja esijala vaheline väändumine (jalg muutub modifitseeritavaks platvormiks) ja see tugevneb jäigastudes (jalg muutub kangiks). Kaarjas paigutus on tegelikult ilmne, tuharaheeliku mähise astme väljendus. Jalal ei ole seega tegeliku, kuid näilise kaare või võlvide tähendust, mis kerimise ajal tõuseb ja spiraali lahti kerimisel langeb. Spiraali mähis koos sellest tuleneva näilise kaarekujulise paigutuse rõhutamisega vastab selle jäigastumisele. Spiraali lahti kerimine koos sellega kaasneva näilise kaare sumbumisega on lõdvestus.
Pukseerimispöörde väändumine on ühendatud suprapodaalsete segmentide (sääre- ja reieluu) välise pöörlemisega.Talus, mis pöörleb väljapoole integreeritult koos jalaluudega, tõuseb kalkule, sulgedes seega tarsali keskosa; tagumine jalg muutub vertikaalseks. Maapinnale kindlalt kleepuv esijalg reageerib tagumisele jalale avaldatud väändejõududele; jalg on jäigastunud.
Talus on luu, millega ükski lihas pole otseselt seotud (sellel pole lihaste sisestusi), see liigub külgnevate luude poolt edastatavate jõudude mõjul. Pöörlemine sagitaaltasandil (paindumine-pikendamine) ja on jala luu kuna see on bimalleolaarsete tangide abil solidaarselt sääreluu ja luuäärega, suprapodaalsete segmentide pöörlemisel põiktasandil (välimine pöörlemine).
Inimese keha on a ebastabiilne tasakaalusüsteem; raskuskeskme kõrgus (ideaaljuhul kolmanda nimmelüli ees) kitsa aluse suhtes ja liigendatud segmentide järjestikune struktuur on ebastabiilsuse tegurid. see tingimus, et otsida stabiilset dünaamilist tasakaalu püstiasendis ja ebastabiilset dünaamilist tasakaalu liikumise ajal (mis võimaldab potentsiaalse energia muundamist kineetiliseks energiaks). See juhtub ennekõike tänu teabeteenusele (naha eksterotseptorid ja proprioretseptorid), mis on nii täpne ja õigeaegne, et võimaldab väga asjakohaseid reaktsioone energiasäästlike sekkumistega (ei ole elektromüograafiliselt tuvastatavad) lihaste poolt, kus on palju punaseid kiude. See on kõige olulisem teabesündmus, kuna see annab inimesele õiguse kohaneda kõige erinevamate keskkonnatingimustega.
Inimese bipodaalset kõndimist tingib seega raskuskeskme tõstmine ja tugipõhja peenus, võrreldes neljajalgsete liikumistega. See on keeruline tegu, mis tuleneb sise- ja välisjõudude vastasmõjust, mida juhib imetlusväärne posturaalne ja keha juhtimine. "tasakaal, mis reguleerib lihaste kaudu hetkede kaupa jõudude vahelisi suhteid. Enamik alajäsemete lihasrühmi on kõndimise ajal aktiivsed (alajäsemel on 29 liikumisvabadust, mis vastab 48 lihasele ).
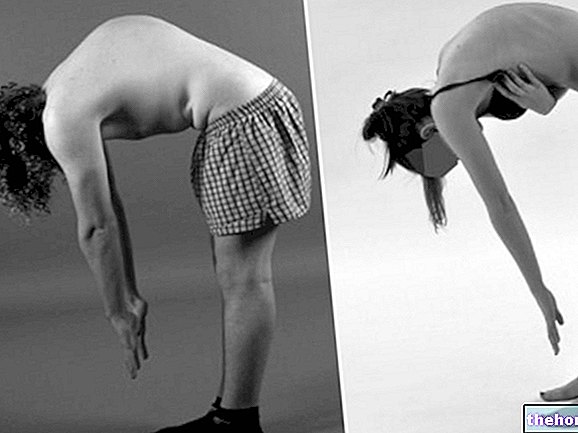
Inimese liikumine on kombinatsioon rütmilisest edasiliikumisest ja keha kõrgemale tõstmisest. Kõndimisel on keha raskuskeskmel sagitaaltasapinnal sinusoidaalne suund, mis ulatub kahekordse toe madalaima punktini (bipodaalne) ja maksimaalse kõrguseni monopodaalse toe puhul, mille ekskursioon on 4-5 cm. Rangelt mehaanilisest seisukohast on keha edenemine ruumis liigesepöörete kombinatsioon. Nii nagu rataste ümmargused liigutused toovad kaasa sõiduki edasiliikumise, põhjustavad jäsemete või nende osade pöörlevad liigutused (osalised ringid) kogu keha edasiliikumist. Tänu keha raskuskeskme kõrgele positsioneerimisele on meie keha kiirendus põhiliselt gravitatsioonilise päritoluga (potentsiaalne energia, mis muundatakse kineetiliseks energiaks). Ainult vähesel määral tulevad mängu kiirenevad lihaste kokkutõmbed ja see on põhjus selle eest, et "mees võib oma teed minna väga pikka aega. Tegelikult võib öelda, et kõndimisel on lihaste töö vajalik ainult raskuskeskme perioodilisel tõusul.
Jalutuskäik see on sama jala kahe kaltsineaalse toe vahel ning koosneb kandevast faasist ja võnkuvast faasist.
Kandev faas
- Kannatugi (vastuvõtt)
Kui kand puutub kokku tugipinnaga (vastuvõtt), vabaneb spiraal, võimaldades jalgade lõtvusel pehmendada keharaskust ja kohaneda pinna endaga. Sel eesmärgil pöörleb alajäseme sisemiselt, astragalus, mis on temaga lahutamatu, pöörleb seetõttu ka sisemiselt (supineeriv), kaltsineus on altid, pöörleb väliselt. Jala eeldatav kaal on järkjärguline ja maksimaalne, kui raskusjoon langeb tuharapinna keskele. - Täielik tugi (võtke ühendust)
Kui kogu talla pind puutub kokku pinnaga, muutub jäseme sisemine pöörlemine järsult väliseks pöörlemiseks, mis käivitab mehhanismi, mille istmeks on subtalaarne liigend. Pärast jäseme pöörlemist pöörleb talla põiki tasapinnal väliselt (keskmiselt umbes 12 °) proneerudes ja tõuseb üle kaltsineuse (eemale kaltsine-scaphoid-plantar sidemest). Kalkulaator pöörleb omakorda sisemiselt, supineerides ümber "kompromissitelje" ("hetkeline" telg, mille ümber toimub a pronatsiooni-supineerimise protsess: tagajalg muutub vastastikuse talla-kaltsineaalse kruvimise teel vertikaalseks.
Kuubikujuline, tugevalt kaltsineusega ühendatud, rändab taimlikult, eeldades "õlgadel" kiilkirjade seeriat.
Esijalg on maapinnale reageerimiseks paigutatud pöörlevasse kontrassi tagajalgadega. Sel moel toimub "põikpöördkruvi mähkimine ja sellest tulenev jala" kaarutamine ": keskosa-liigend on blokeeritud ja seal on raskuse samaaegne läbimine IV ja V metatarsusel esijala ümberpööramiseks, mis pole veel jäik.
Peroneaalne lihas (pikk peroneal) tõmbab esimese pöialuu pea maapinnaga kokku, tehes stabiliseerimistööd nii, et kaal jaguneb nüüd kõigile pöialuudele (pöialuu ventilaator); jalg muutub propellerist jäigaks "kanglatiks". - Digitaalne tugi (tõukejõud)
Konts tõuseb maast üles. Pärast tugevat kohanemist tugipinnaga sõrmed painduvad dorsaalselt. See põhjustab jalatalla aponeuroosi lühenemist, mis pingestub u. 1 cm (plantaarse aponeuroosi digiteeringud ulatuvad liigestega külgnevates segmentides vastavate basaalfalangeeni, ühendades luuümbrisega), käivitades vintsi mehhanismi, mis viib lõpule intrapodaalse sidususe.
Keha raskuskese migreerub ventraalselt ja keha hakkab ettepoole kukkuma. Lihaskontrolli, eriti suuraalse triitsepsi lihase sekkumine, mille moodustavad gastrocnemius ja soleus (lisaks sääreluu eesmisele, tagumisele sääreluule, longus peroneusile ja selja painutajatele) ning õigeaegne vastaspoolne kokkupuude, pidurdavad.
Tõukejõu faasis on jalale mõjuvad jõud 3-4 korda kehakaaluga võrdsed. Õige füsioloogia olukorras käitub jalg nagu heeliks selliselt, et keha raskuskeskme maapinnal olev projektsioon jääb enamasti tsentreerituks ehk liigub piki oma telge, mis vastab "ligikaudu"rehvi telg, telg läheb tsentraalselt tagumise jalani ja teise ja kolmanda sõrme vahele.

Võnkefaas
Võnkefaas kujutab ette kandvat faasi.Jäseme sisemine pöörlemine ümber mehaanilise telje, mis algab selles faasis, on järgneva välise pöörlemise vältimatu eeldus. Tänu sellele pöörete vaheldumisele muundatakse potentsiaalne energia inimkehas kineetiliseks energiaks. Võnkuvad ja kandvad faasid on seega seotud progressiooni järjepidevusega. Tõstependel on tegelikult kandev pendel. Neuro-lihaste kompleks jälgib seda vastastikust üleandmist, stabiliseerides, moduleerides ja iseloomustades seda kui tüüpilist individuaalsuse väljendust.
Sünnitamisel on kõndimisele eelsoodumusega närviskeemid juba olemas, kuid luu- ja lihaskonna piisava ja hädavajaliku arengu võimaldamiseks pärsivad need ajutiselt kõrgemad keskused. Seega muutub kehahoiak kui vabatahtlik tegu küpsemis- ja õppimisnähtuseks. Umbes aastane , algab esmalt õpitud ja seejärel automatiseeritud kõndimine. Alles umbes kaheaastaselt, pärast suhteliste struktuuride väljatöötamist, on automaatjuhtimine tõhus.
Seetõttu on tänapäevane biomehaanika just põiktasandil tuvastanud esmatähtsa ruumilise elemendi inimese staatikas ja dünaamikas. Tegelikult käivitub antigravitatsioonimehhanism põiktasandil toimuvast pöörlemisest, mis võimaldab raskuskese rännata ülespoole .. Raskuskeskme kõrgus laeb süsteemi potentsiaalse energiaga või ebastabiilsusega, mis aga, nagu ma ütlesin, muundub dünaamikas hädavajalikuks kineetiliseks energiaks, võimaldades seega ruumis liikuda tagasihoidliku lihasenergia tarbimisega.
Liigendid, milles liikumine toimub põiki, on suletud kineetilise ahelaga koksofemoraalne ja subtalaarne. Täpsemalt on koksofemoraalliiges ja talla-õlaliigese analoogne struktuur ja vastavalt paigutatud. Puusa antigravitatsioonimehaanika olulised liigutused on pikendus ja samaaegne väline pöörlemine. Üleminekul painutuselt pikendamisele pöörleb reieluu väljapoole, peegeldudes reie vabastamise-jäigastamise mehhanismis. Seetõttu on see anatoomilis-funktsionaalne seisund, mis soosib meie antigravitatsiooni.
Alajäseme morfoloogiliste ja funktsionaalsete omaduste analüüs põiktasandi suhtes avab suure struktuurse patoloogia peatüki, milles käsitletakse reie-sääreluu pöörlemise kõrvalekaldeid ja tagasilöögi funktsiooni ning vastupidi. Sel viisil visatakse tugev sild, mis ühendab jala üha enam kehaosaga, eriti vaagnavööga, abaluu-õlavarrega, emakakaela-kuklaliigetega kuni temporomandibulaarse liigeseni. biomehaanikast ja patomehaanikast.
Muud artiklid teemal "Rüht ja heaolu -" Plantar Support "tähtsus"
- Rüht ja tervis - jalad ja kehahoiak
- Hoiak
- Rüht ja heaolu - vale podaali tugi
- Rüht ja heaolu - funktsionaalne skolioos
- Rüht ja heaolu - posturaalse päritoluga orgaanilised talitlushäired
- Rüht ja heaolu-Posturaalne eksam ja ümberõpe
- Rüht ja heaolu